
脉冲雷达和调频连续波(FMCW)雷达是雷达的两种分类,以下从技术解析调频连续波(FMCW)雷达工作原理。
1.雷达分类
雷达按照发射信号种类分为脉冲雷达和连续波雷达两大类,常规脉冲雷达发射周期性的高频脉冲,连续波雷达发射的是连续波信号。
脉冲多普勒雷达 的工作原理可表述如下:当雷达发射一固定频率的脉冲波对空扫描时,如遇到活动目标,回波的频率与发射波的频率出现频率差,称为多普勒频率。根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度;根据发射脉冲和接收的时间差,可以测出目标的距离。同时用频率过滤方法检测目标的多普勒频率谱线,滤除干扰杂波的谱线,可使雷达从强杂波中分辨出目标信号。所以脉冲多普勒雷达比普通雷达的抗杂波干扰能力强,能探测出隐蔽在背景中的活动目标。
连续波雷达 发射的信号可以是单频连续波(CW)或者调频连续波(FMCW),调频方式也有多种,常见的有三角波、锯齿波、编码调频或者噪声调频等。其中,单频连续波雷达仅可用于测速,无法测距,而FMCW雷达既可以测距又可测速,并且在近距离测量上的优势日益明显。
2.调频方式
连续波雷达 发射的信号可以是单频连续波(CW)或者调频连续波(FMCW),调频方式也有多种,常见的有三角波、锯齿波、编码调制或者噪声调频等。其中,单频连续波雷达仅可用于测速,无法测距,而FMCW雷达既可测距又可测速,并且在近距离测量上的优势日益明显。
3.工作原理
FMCW雷达在扫频周期内发射频率变化的连续波,被物体反射后的回波与发射信号有一定的频率差,通过测量频率差可以获得目标与雷达之间的距离信息,差频信号频率较低,一般为KHz,因此硬件处理相对简单、适合数据采集并进行数字信号处理。
4.FMCW优缺点
FMCW雷达收发同时,理论上不存在脉冲雷达所存在的测距盲区,并且发射信号的平均功率等于峰值功率,因此只需要小功率的器件,从而降低了被截获干扰的概率。FMCW雷达具有容易实现、结构相对简单、尺寸小、重量轻以及成本低等优点,在民用/军事领域均得到了广泛的应用。
其缺点是测距量程较短,距离多普勒耦合以及收发隔离难。
5.FMCW雷达框图
调频连续波雷达如要由收发器和带微处理器的控制单元组成,收发器如果使用单个天线进行同时发射和接收,FMCW雷达需要铁氧体环形器来分离发射和接收信号,对隔离度要求较高。当然,若使用收发分离的贴片天线,成本会相对低一点。

高频信号由压控振荡器(VCO)产生,通过功率分配器将一部分经过额外放大后馈送至发射天线,另一部分耦合至混频器,与接收的回波混频、低通滤波,得到基带差频信号,经过模数转换后送至微处理器处理。
6.FMCW雷达测距/测速原理
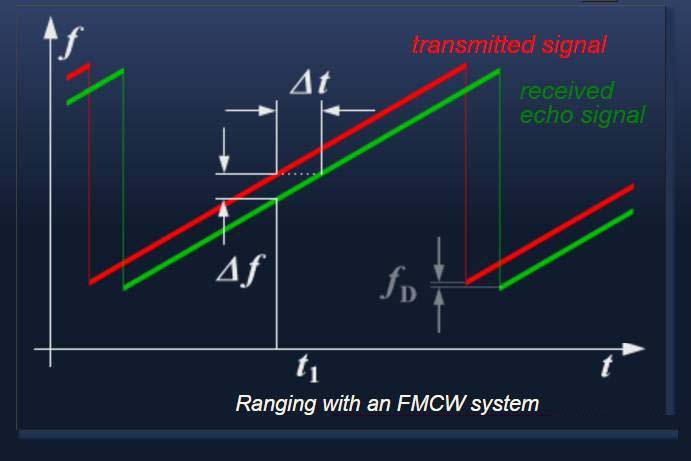
以三角波调频连续波为例来简单介绍雷达的测距/测速原理。如下图,红色为发射信号频率,绿色为接收信号频率,扫频周期为T,扫频带宽为B,发射信号经过目标发射,回波信号会有延时,在三角形的频率变化中,可以在上升沿和下降沿两者上进行距离测量。
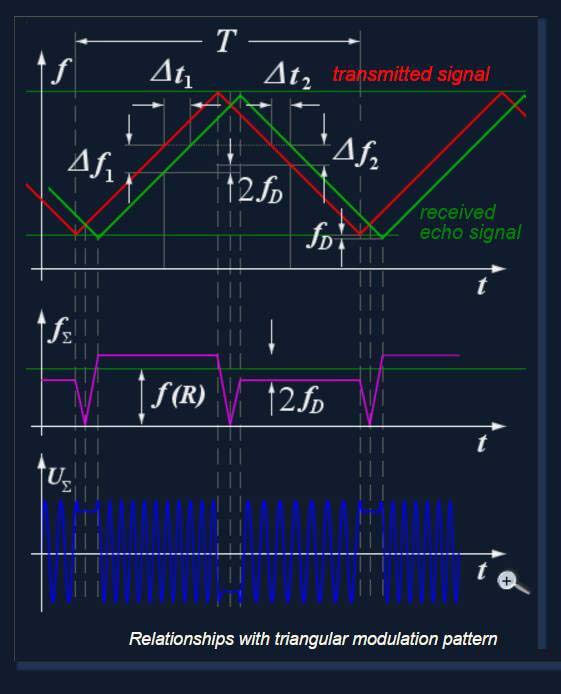
如果没有多普勒频率,上升沿期间的频率差值等于下降沿期间的测量值。对于运动目标,则上升/下降沿期间的频率差不同,我们可以通过这二个频率差来测距和测速。

差拍信号经过低通滤波和放大后送数字信号处理器,完成对差拍信号的FFT、检测,对目标数据进行计算后送显控终端显示。三角波调频连续波雷达正是通过采用正负调频斜率来消除距离与速度的耦合,进而进行目标速度的估计。
 微信扫一扫
微信扫一扫